


Progress on Robotic Muscles
January 2024 Updates

Hey everyone! I’ve been continuing to work on the robotic muscle project in the last few months. Here’s a quick recap of what’s new.
The newest actuator is 8 Flex PCBs folded together, and is able to run at 4kV no problem. It can easily lift up weights.

Left: 4 Flex PCBs at 800V; Right: 8 Flex PCBs at 4kV I’m preparing a really big Flex PCB order, with the same design as before but many times longer (250mm vs 1200mm long). The result should be an actuator 10cm long with a 2-3cm stroke length.
The order is quite a bit more expensive than previous ones ($1500USD). If you want to help me fund this order, I created a Stripe link for people who want to sponsor my project! (you can change the amount, preset is $100).


Expenses Graph Continued
Speaking of money, I’ve been spending a lot of it. Last update I created a fun graph comparing progress made vs project costs. I’ve extended the graph to include the last 3 months.
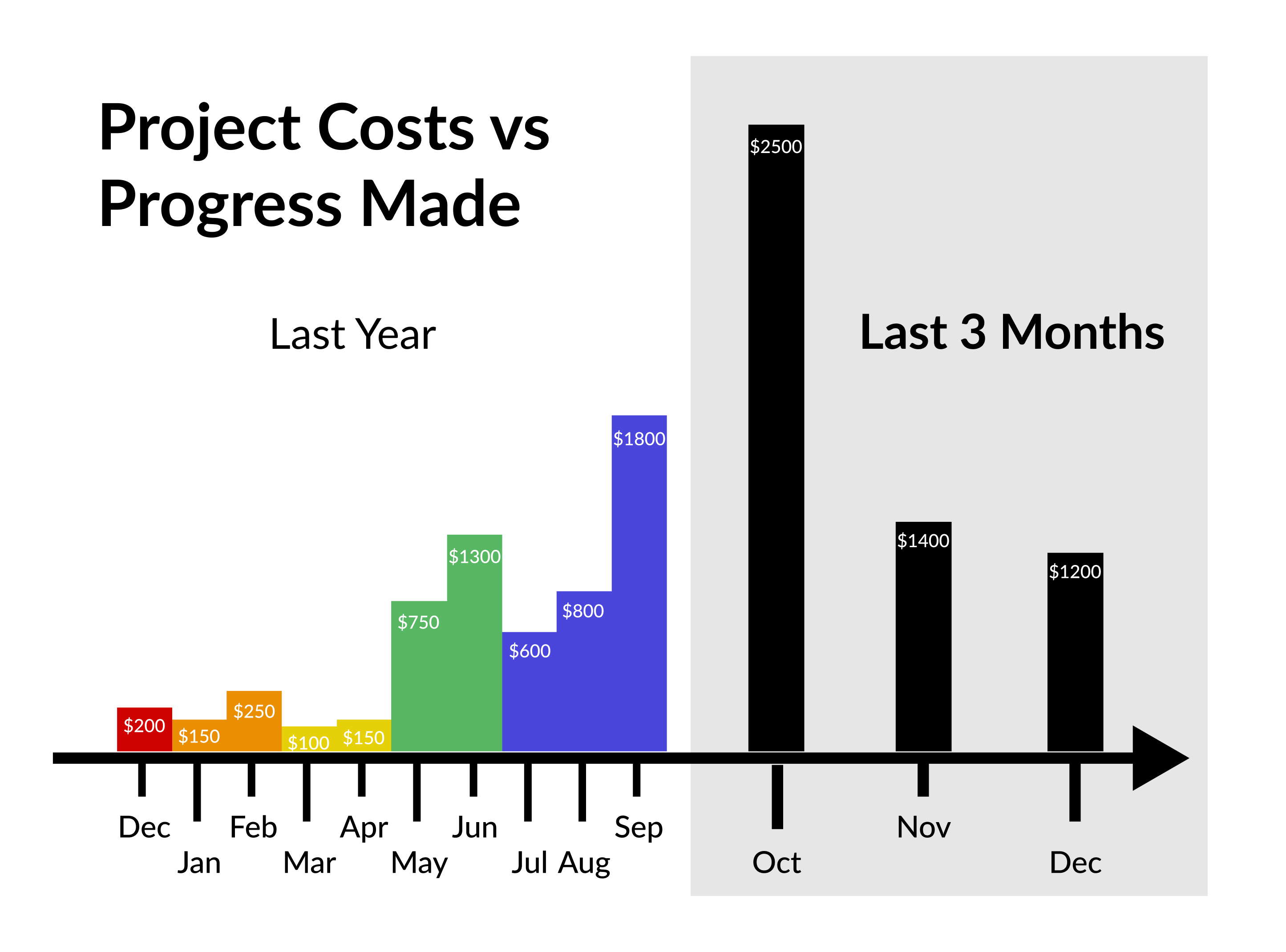
I am finally reaching the point where I’m starting to run out of that sweet sweet semiconductor money. So uh, if you want to become a project sponsor, it would be great timing!
Visiting Portland
I’m going to be visiting Portland next week to visit LPKF, to try out their Flex PCB prototyping machine. The machine would allow me to iterate on designs daily rather than weekly. Alternatively I could go live in Shenzhen (yeah no.)

Other Notes
I’m reading Experimental Researches in Electricity by Michael Faraday. It’s been fun reading the account of a fellow empiricist figuring out the wonders of electricity.
I’m going to be visiting LA (El Segundo) later this month. But don’t worry about me, I’m sure I’ll ultimately stay loyal to SF!
I’ve been on CatchMe for the last few days, and it’s been a lot of fun to check in with friends. It reminds me of Snapchat, but without being nearly as addicting (plus it’s made by some awesome friends). If anyone reading joins the app, definitely add me! (@daviderady)
Anyways, that’s it for this month. See you next time.