



Hey everyone! I’ve been making progress on the robotic muscle project and wanted to write this post to highlight some recent milestones.
I’ve been posting updates of each iteration of actuator I build on Twitter, so follow me there if you haven’t already! But here’s a quick recap.
Made a high voltage power supply. It can go up to 4000V (current limited to keep me safe). I’m using it to control the actuator. Here’s a GIF of version 1 of the actuator from a month ago.
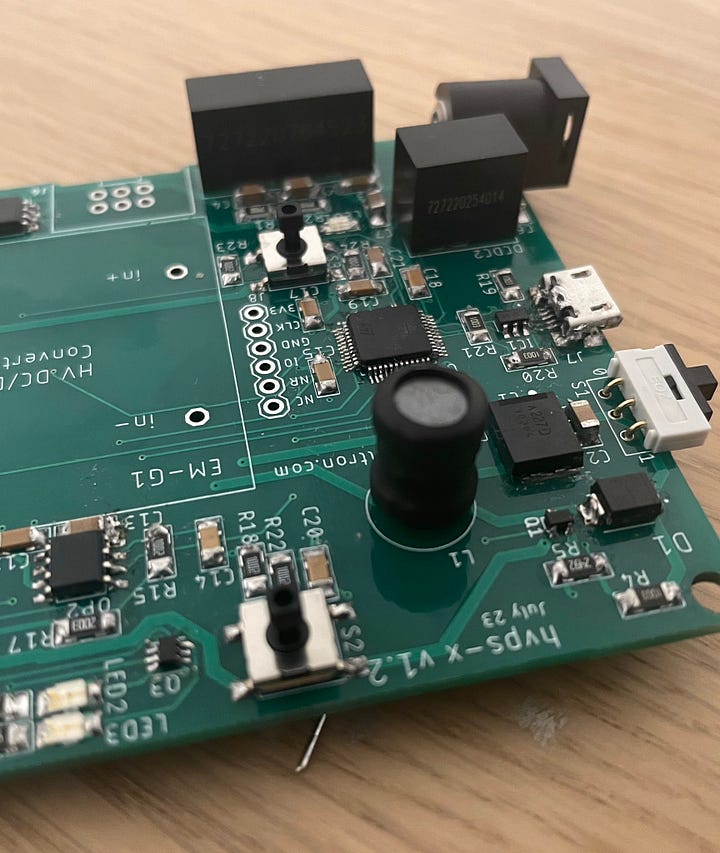
Left: Actuator V1; Right: Power Supply Using Flex PCBs for version 2. They look really sleek. But the bends are way too rigid right now. My main task ahead is to fine tune the ridigity of the folds.
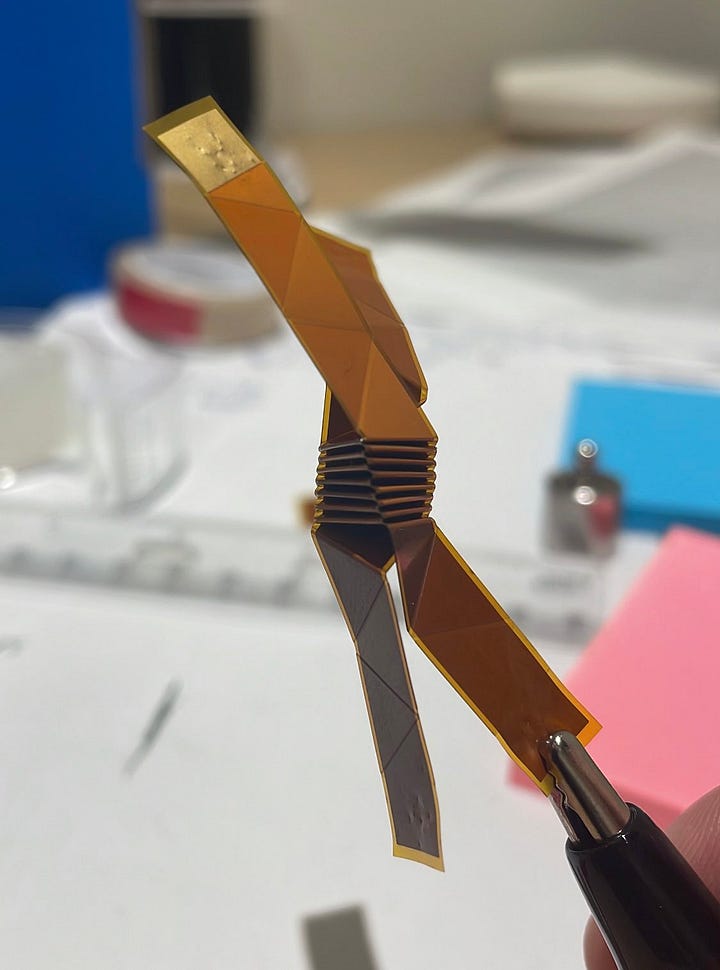

Left: Flex PCB; Right: Recent Experiment There a few other dead-end experiments that I’m skipping in this recap.




Project Costs vs Progress Made
My burn rate has definitely gone up as the project becomes more complex. But I’ve also been making a lot more progress at each step. There’s a really great video by Scott Nolan, who is a partner at Founders Fund, where he talks about the cycle of
obtain resources → invest resources → achieve milestones → repeat

I think about this cycle a lot, and how I can show proof that I can do cool things (to obtain more resources)!
If Davide can do this really cool thing with $3000, imagine what he could do with $30 000??
I made this fun graph showing project expense each month, and what project milestone I reached at that point.
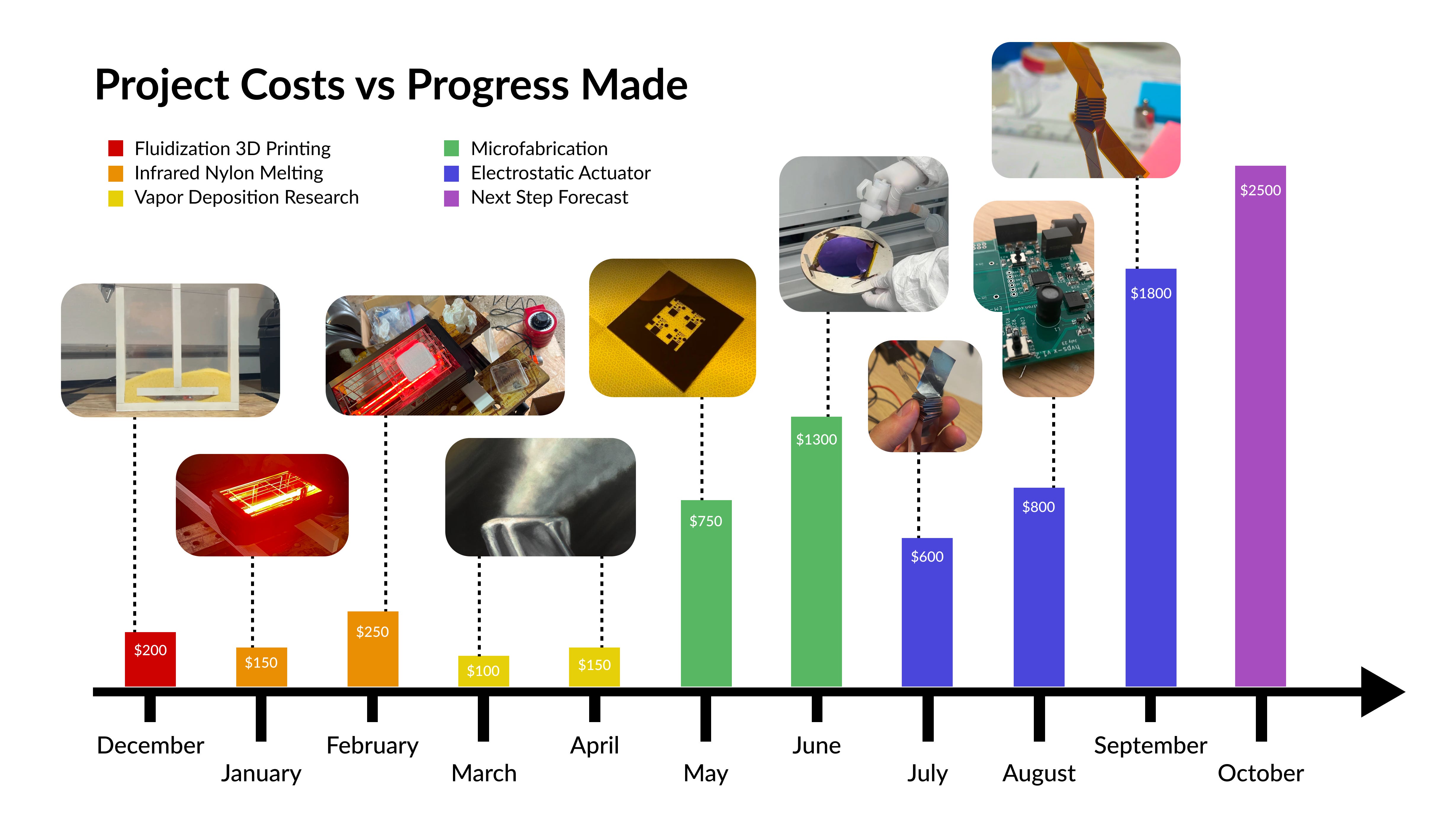
So the takeaway is that even though my burn rate has increased, it’s fine. So long as I keep on making progress! There’s again another great Scott Nolan post on exactly this: Burn Rate Doesn’t Matter.
I honestly love a lot of Scott’s stuff, but he doesn’t post very often! But hey maybe if someone here knows him, you can connect me — and I can get more of his insights! 😄
Next Steps
My main goal in the next few months is to keep on tinkering on the electrostatic actuator. Now that I’ve established a baseline for what’s possible, I’m going to improve the force output and lower the operating voltage.
There’s easily room for a 10x improvement in the design I’ve been working on.
Long term, my goal would be to operate an artificial muscle that is stronger than human muscle with a 9V battery. This would be a gamechanger for the way we make robots.
I’m looking into some grant options to help me fund the project. I’m interested in getting an Emergent Ventures grant. If you feel you know Tyler well enough, I’d really appreciate a recommendation.
If I can continue to make progress, at the rate I’ve been going, I think it would make sense for me to raise around the start of next year. The most important thing for that will be to have a really good prototype, where the path is clear to a commercial product within the next year.
Book Recommendation
One final thing. I’ve already posted about it on Twitter, but I’ve really been enjoying this great book — Building Scientific Apparatus.

My favorite chapters so far have been on laser optics, and on vacuum systems. I’m reading it out of order, which is how I enjoy reading most books. Definitely a book I would recommend to people interested in microfabrication!
Anyways, that’s it for this month. See you next time.